Actuators are typically a combination of a motor and a gearbox. Motors usually have a rotating part (rotor) which transfers motion or driving power to a gearbox.
The gearbox (or reducer) reduces the motor speed and simultaneously amplifies motor torque. In fact, the gearbox does more than this - they inflate the inertia of the rotor and makes it feel significantly heavier. The inflated inertia of rotor is called 'reflected inertia'.
Let's take an example of a bicycle at rest. If the gear train is set to higher gear ratio, it takes huge effort to turn the rear wheel in the beginning (feels heavy). Similarly, if a robot uses high-gear-ratio actuators, you need to push the robot quite hard to move it around. In case of industrial manipulators (e.g., UR3 manipulator), you need actuators' assistance when you manually grab the robot and move it around to your liking.
Let's briefly summarize what a gearbox (of gear ratio $n$) or a reducer does.
1. Velocity reduction: $(\textrm{output velocity}) = \frac{1}{n}(\textrm{input velocity})$
2. Torque amplification: $(\textrm{output torque}) = n(\textrm{input torque})$
3. Inertia reflection: $(\textrm{inertia at output}) = n^2(\textrm{inertia at input})$
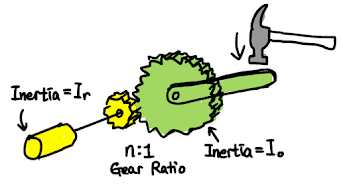
We can further develop on how the inflated inertia affects the system. Imagine a system with a small rotor with some inertia $I_r$ connected to a link through a $n:1$ gearbox. Without the gearbox, you would only feel the inertia of the link ($I_0$). So, if you hammer on the link, it will probably rotate quite fast. However, with the rotor attached via the gearbox, you will feel the combined inertia of $n^2 I_r + I_0$. Then, the whole system would not turn fast upon impact, and the impact might break the limb or even a tooth of the gears. For example, industrial manipulators' gear ratio could reach more than $100$, which inflates the rotor inertia by more than $\times10000$. So, those manipulators are almost impossible to manually pushed or pulled due to the massive reflected inertia. In fact, the heaviness is one of the reason why those manipulators could be dangerous; either the mechanical components could be damaged by unexpected collisions or, in turn, the robot can damage the environment including human! A quick solution would be to put some springy or soft material like below:





Comments
Post a Comment